
About Me
Ciao! I am Wenhui (Oscar) Huang, a Ph.D. candidate and Research Associate in the Automated Driving and Human-Machine System Lab at Nanyang Technological University (NTU), advised by Prof. Chen Lv. This March, I am excited to join the Harvard Computational Robotics Group as a visiting fellow, hosted by Prof. Hank Yang. Previously, I had the pleasure of collaborating with Prof. Francesco Braghin during my time at the i.Drive Lab.
📌 I will graduate in Summer 2025 and am actively seeking a postdoctoral researcher position! Please reach out to me if you think I might be a good fit. 📌
Research Interests
| Research Field | Research Application |
|---|---|
| Reinforcement Learning | Intelligent Tranporatation Systems |
| Continual Learning | Robotics |
| VLM and VLA | Autonomous Vehicles |
| Human-in-the-Loop AI | Visual Navigation |
🔥 News
- Apr. 2025: 🏅🏅 I am honored to be recognized as a featured PhD candidate in ITS field by IEEE Intelligent Transportation Systems Society (ITSS)!
- Mar. 2025: 🌱🌱 Our paper on deep imitative reinforcement learning-based decision-making for autonomous driving has been accepted by Transportation Research Part C!
- Jan. 2025: ☃️☃️ Our paper on integrated hybrid prediction and planning for autonomous driving has been accepted by TPAMI!
- Dec. 2024: 🎄🎄 Our work on VLM-based closed-loop autonomous driving is now available on arXiv! WiseAD
- Jul. 2024: 🏖️🏖️ Our ITSC 2025 invited session on Learning-empowered Intelligent Transportation Systems: Foundation Vehicles and Coordination Technique received 11 paper submissions, and 10 papers were accepted. Congratulations to all the authors! Looking forward to seeing you in Edmonton, Canada!
- Jun. 2024: 🏖️🏖️ Our paper on safety human-in-the-loop RL for autonomous driving has been accepted by T-ITS!
- Jun. 2024: 🏆🏆 Our team secured first place in the Waymo Open Dataset Occupancy Flow Challenge and second place in the Sim Agents Challenge! Check out our technical reports on the Waymo challenge website and CVPR 2024 Workshop on Autonomous Driving.
- May. 2024: 🌱🌱 Visited Gran Turismo Sophy team at Sony AI, Japan, and gave a talk on RL for autonomous racing!
- Apr. 2024: 🌱🌱 Our paper on robust RL for autonomous driving has been accepted by Transportation Research Part C: Emerging Technologies!
- Jan. 2024: ☃️☃️ Our paper on uncertainty-aware RL with human guidance for autonomous driving has been accepted by ICRA! See you in Yokohama, Japan!
- Nov. 2023: ☃️☃️ Our paper on robust RL for decision-making has been accepted by Engineering!
- Oct. 2023: 🍁🍁 Our paper on learning from demonstration for RL-based eco-driving has been accepted by Energy!
- Sep. 2023: 🍁🍁 Our paper on sampling efficient preference-guided DQN (PGDQN) algorithm has been accepted by TNNLS!
- Sep. 2023: 🍁🍁 Our paper on goal-oriented transformer-based autonomous navigation has been accepted by T-ITS!
- Sep. 2023: 🏅🏅 We won the best paper runner-up award in ITSC 2023!
- Dec. 2022: 🥈🥈 Our team secured second place at Intelligent Algorithm Final of Alibaba Global Future Vehicle Challenge!
📝 Publications
Highlights
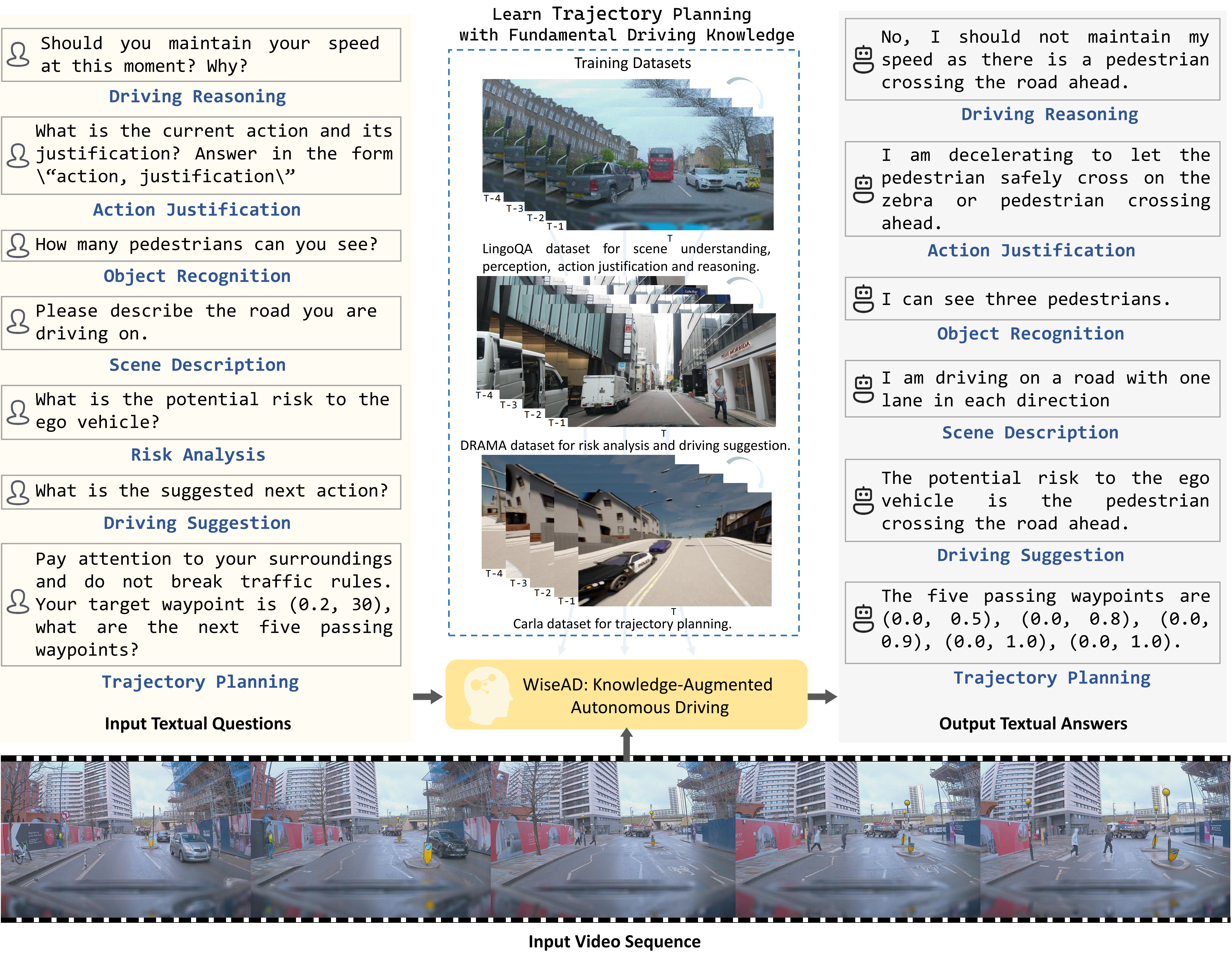
WiseAD: Knowledge Augmented End-to-End Autonomous Driving with Vision-Language Model

Songyan Zhang1, Wenhui Huang1, Zihui Gao, Hao Chen, Chen Lv
1Equal Contributions
- we investigate the effects of the depth and breadth of fundamental driving knowledge on closed-loop driving performance and introduce WiseAD, a specialized VLM tailored for end-to-end autonomous driving capable of driving reasoning, action justification, object recognition, risk analysis, driving suggestions, and trajectory planning across diverse scenarios.
 >
>
Safety-aware human-in-the-loop reinforcement learning with shared control for autonomous driving

Wenhui Huang, Haochen Liu, Zhiyu Huang, Chen Lv
- we propose a safe human-in-the-loop RL (SafeHiL-RL), combined with curriculum guidance, to enable safe and efficient decision-making policies for autonomous vehicles.

Wenhui Huang, Zitong Shan, Shanhe Lou, Chen Lv
- We propose an uncertainty-aware RL (UnaRL) framework, incorporating multimodal human guidance, to achieve robust decision-making policies for autonomous vehicles.
 >
>
Goal-guided Transformer-enabled Reinforcement Learning for Efficient Autonomous Navigation
Wenhui Huang, Yanxin Zhou, Xiangkun He, Chen Lv
Sim to Real Video: Youtube | BiliBili
- We propose a goal-oriented transformer-based RL algorithm to realize efficient and adaptative visual navigation.
 >
>
Sampling Efficient Deep Reinforcement Learning Through Preference-Guided Stochastic Exploration

Wenhui Huang, Cong Zhang, Jingda Wu, Xiangkun He, Jie Zhang, Chen Lv
- We propose a sampling efficient stochastic exploration policy, preference-guided DQN (PGDQN), to enhance the performance of reinforcement learning algorithms.
Selected Publications
-
Hybrid-Prediction Integrated Planning for Autonomous Driving, Haochen Liu, Zhiyu Huang, Wenhui Huang, Haohan Yang, Xiaoyu Mo, Chen Lv, IEEE T-PAMI’25
-
WiseAD: Knowledge Augmented End-to-End Autonomous Driving with Vision-Language Model, Songyan Zhang1, Wenhui Huang1, Zihui Gao, Hao Chen, Chen Lv, arXiv’24
-
Safety-aware human-in-the-loop reinforcement learning with shared control for autonomous driving, Wenhui Huang, Haochen Liu, Zhiyu Huang, Chen Lv, IEEE T-ITS’24
-
Trustworthy autonomous driving via defense-aware robust reinforcement learning against worst-case observational perturbations, Xiangkun He, Wenhui Huang, Chen Lv, Transportation Research Part C: Emerging Technologies’24
-
Uncertainty-aware Reinforcement Learning for Autonomous Driving with Multimodal Digital Driver Guidance, Wenhui Huang, Zitong Shan, Shanhe Lou, Chen Lv, IEEE ICRA’24
-
Toward trustworthy decision-making for autonomous vehicles: A robust reinforcement learning approach with safety guarantees, Xiangkun He, Wenhui Huang, Chen Lv, Engineering’24
-
Expert-demonstration-augmented reinforcement learning for lane-change-aware eco-driving traversing consecutive traffic lights, Chuntao Zhang, Wenhui Huang, Xingyu Zhou, Chen Lv, Chao Sun, Energy’24
-
Sampling efficient deep reinforcement learning through preference-guided stochastic exploration, Wenhui Huang, Cong Zhang, Jingda Wu, Xiangkun He, Jie Zhang, Chen Lv, IEEE TNNLS’23
-
Goal-guided transformer-enabled reinforcement learning for efficient autonomous navigation,Wenhui Huang, Yanxin Zhou, Xiangkun He, Chen Lv, IEEE T-ITS’23
-
Potential hazard-aware adaptive shared control for human-robot cooperative driving in unstructured environment, Wenhui Huang, Yanxin Zhou, Jianhuang Li, Chen Lv, IEEE ICARCV’22
-
Safe decision-making for lane-change of autonomous vehicles via human demonstration-aided reinforcement learning, Jingda Wu, Wenhui Huang, Niels de Boer, Yanghui Mo, Xiangkun He, Chen Lv, IEEE ITSC’22
-
Prioritized experience-based reinforcement learning with human guidance for autonomous driving, Jingda Wu, Zhiyu Huang, Wenhui Huang, Chen Lv, IEEE TNNLS’22
-
Learning to drive via apprenticeship learning and deep reinforcement learning, Wenhui Huang, Francesco Braghin, Zhuo Wang, IEEE ICTAI’19
-
Autonomous vehicle driving via deep deterministic policy gradient, Wenhui Huang, Francesco Braghin, Stefano Arrigoni, ASME IDETC-CIE’19

🎖 Honors and Awards
- Apr. 2025 Featured PhD Candidate in ITS field, IEEE ITSM.
- Jun. 2024 1st Place Winner, Waymo Open Dataset Occupancy Flow Challenge, CVPR Workshop on Autonomous Driving.
- Sep. 2024 Best Paper Runner-up Award, ITSC 2023.
- Dec. 2022 2nd Place Winner, Intelligent Algorithm Final of Alibaba Global Future Vehicle Challenge.
- Mar. 2017 Politecnico Di Milano DSU Scholarship.
- Jun. 2015 Outstanding Graduate (Top 1%).
- Oct. 2014 National Scholarship (Top 1%).
- Oct. 2013 First Prize Scholarship.
- Oct. 2012 Excellent Student Scholarship.
📚 Academic Services
Program Committee
- Lead organizer of Invited Session on “Foundation Model-Enabled Scene Understanding, Reasoning, and Decision-Making for Autonomous Driving and ITS” at ITSC, 2025. (Website to be updated)
- Lead organizer of Invited Session on Learning-empowered Intelligent Transportation Systems: Foundation Vehicles and Coordination Technique at ITSC, 2024
Journal Reviewer
- IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)
- IEEE Transactions on Intelligent Transportation Systems (T-ITS)
- IEEE Transactions on Neural Networks and Learning Systems (TNNLS)
- IEEE Transactions on Vehicular Technology (TVT)
- IEEE Transactions on Intelligent Vehicles (TIV)
- IEEE Transactions on Automation Science and Engineering (T-ASE)
- Engineering
Conference Reviewer
- IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR) 2025
- IEEE International Conference on Robotics and Automation (ICRA) 2023 – 2025
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023 - 2025
- IEEE Intelligent Vehicles Symposium (IV) 2023 – 2025
- IEEE Intelligent Transportation Systems Conference (ITSC) 2023 – 2025
💬 Invited Talks
- Mar 2025, Reinforced Continual Evolution of Decision-Making Systems
School of Vehicle and Mobility, Tsinghua University, Beijing, China.
Traffic Operations and Simulations Lab, Tongji University, Shanghai, China. - Feb. 2025, Reinforced Continual Evolution of Decision-Making Systems
Engineering Research Center for Intelligent Electrified Mobility, SouthEast University, Nanjing, China.
Prof. Chunhua Shen’s Lab, Zhejiang University, Hangzhou, China. - Nov. 2024, Reinforced Continual Evolution of Decision-Making Systems, Harvard Computational Robotics Group, Harvard University, Cambridge, USA.
- Sep. 2024, Reinforcement Learning-empowered Decision Making for Autonomous Driving under Knowledge Guidance, Michigan Traffic Lab, University of Michigan, Michigan, USA.
- May. 2024, Uncertainty-aware Reinforcement Learning for Autonomous Driving and Autonomous Racing, Gran Turismo Sophy team, Sony AI, Tokyo, Japan.
👀 Visits: Loading...